OpenScan 3D-Scanner Teil 1 – Der Zusammenbau und erster Test
Nach dem Projekt ist vor dem Projekt! Nicht wahr? Nachdem ich meinen Prusa 3D-Drucker fertig hatte, stand das Projekt eine 3D-Scanners an. Die Dinger gibt es natürlich wieder von… bis… Sie unterscheiden sich in Größe, Form, Technologie und damit natürlich auch in der Qualität und Größe / Detail des gescannten Objektes.
Für den Hausgebrauch gibt es z.B. die Laser-Abtastung, was zwar sehr genau sein soll, aber (logischerweise, wer in Physik aufgepasst hat) Problem mit transparenten oder stark reflektieren Objekten hat. Dann gibt es den Scan per Foto, wobei die Kamera um das Objekt oder das Objekt vor der Kamera rotiert (z.B. Handy, Pi-Cam oder DSLR o.Ä.). Dabei wird eine Art Gitter erstellt, wodurch das Objekt in 3D errechnet wird. Außerdem ist die Lidar-Abtastung recht neu auf dem Markt – Lidar kennt man z.B. von besseren Staubsaugroboter. Lidar ist mit am Genauesten, allerdings ist diese Technologie mit am Teuersten (z.B. das iPhone 12 Pro ist das erste Modell mit Lidar-Sensoren).
Laser kam für mich nicht infrage, da ich auch transparente Objekte einscannen möchte. Lidar ist mir zu teuer. Daher kam die Lösung mit einer Kamera ins Haus – OpenScan, ein preiswerter, qualitativ hochwertiger Scanner zum Selberbauen. Alle Kunststoffteile werden dabei selbst gedruckt, was die Anschaffung günstig macht.
Weitere Infos könnt Ihr hier sehen: https://www.openscan.eu/openscan
Ich habe mich für den OpenScan als Raspberry Pi Bausatz mit Pi Cam und Ringlicht entschieden. Das klang nach einem guten Einsteiger-Set. Es muss nichts gelötet werden, alle Teile sind dabei, wurde versprochen. Zusätzlich habe ich mir ein LCD-Display bestellt. Da beim Pi-Aufbau die Steuerplatine aber mit im Kasten der Pi liegt und nicht in der Display-Einheit war mir die Montage nicht klar. Daher blieb das erstmal außenvor. Gesteuert wird eh über ein Webinterface – also ein großes Teil weniger auf dem Tisch…
Die Kunststoffteile sind bei Thingiverse zu finden, wobei ich mir den Kasten für die Pi und das Kamera-Modul umgebaut habe. Normalerweise liegt die Platine offen. Um das System aber auch mal sicher verstauen zu können, wollte ich einen geschlossenen Kasten.
https://www.thingiverse.com/thing:3050437
https://www.thingiverse.com/thing:4036102
Passend zu meinem Prusa-Aufbau habe ich die Teile auch in Schwarz und Orange ausgedruckt, den Diffusor des Ringlichts transparent mit orangenem Rahmen. Die Details für den Ausdruck (Auflösung und Infill) stehen mit in den Thingiverse-Projekten.
Beim Lesen der Anleitung und beim gelieferten Set merkt man gleich, dass es ein OpenSource Projekt ist und sich an technisch versierte Personen richtet. Die Schraubenauswahl passte nicht so ganz zu den gedruckten Teilen – von den kürzeren Schrauben waren zu viele dabei, von den längeren zu wenig. Nicht schlimm, kann man für den Druck anpassen. Da der Druck aber lange dauert, geht im Notfall viel Zeit und Material verloren – oder man hat durch Zufall die richtigen Schrauben. Ansonsten ist alles ausreichend für Techniker beschrieben.

Ja, während der Display-Montage ist mir dann aufgefallen, dass die daneben liegende Steuerplatine beim Pi-Modell in der Forma gar nicht dabei ist und mir im Kasten des Pi liegt… Also kamen die beiden Teile zur Seite. Auch ganz gut, da ich die Schrauben woanders brauchte… Der Aufbau des Scanners selbst war einfach.

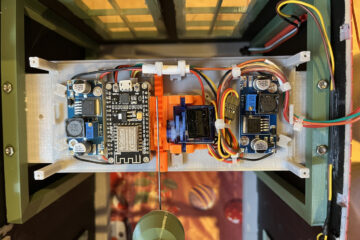
Nun folgte der Einbau und die Verkabelung der Platinen – bestehend aus dem Controller, auf den die Motoren und der Pi gesteckt, an dem wiederum Kamera und Ringlicht angeschlossen werden.

100%ig passgenau waren die ganzen Löcher nicht, was aber auch in der Anleitung angemerkt wird (das kommt auch immer ein wenig auf den 3D-Drucker an). Der Zusammenbau ist ein wenig frickelig. Aber es ging trotzdem alles recht schnell. Sieht auch schon ganz nett aus!

Nun ging es noch ans Flashen der mitgelieferten SD-Karte mit dem Betriebssystem für den Pi. Das Image wird fertig heruntergeladen und mit dem empfohlenen Tool auf die Karte gepresst.

Danach wird noch das zu benutzende WLAN in der Config-Datei eingetragen, die SD-Karte in den Pi gesteckt und das System das erste Mal ge bootet! Und siehe da: ein Webinterface und die Kamera will auch schon!

Allerdings ist mir aufgefallen, dass der Diffusor recht viel Licht reflektiert und die Kamera so unnötig überbelichtet. Daher habe ich mir kurzerhand eine Art Gegenlichtblende gezeichnet und gedruckt, die seinen Zweck sehr gut erfüllt. Sie wird einfach nur auf das Kameramodul gesteckt.

Nun konnte ich einmal alle grundlegenden Funktionen testen – also Kameraeinstellungen und die Steuerung der Motoren.
Also für den ersten Aufbau schon mal nicht schlecht! Die Tage gehts dann weiter. Bestimmt muss da noch kalibriert und konfiguriert werden. Mal schauen 🙂


0 Kommentare